以下是視頻文字稿:
能讓機器認識未知環境的 SLAM,被用在哪些場景?
首當其衝的當然是各類機器人,為了更好的“遍歷”地板,就算是掃地機器人也會用到SLAM;無人機的自主避障,高級別的自動駕駛,還有時下正火的 AR,SLAM 都有用武之地。
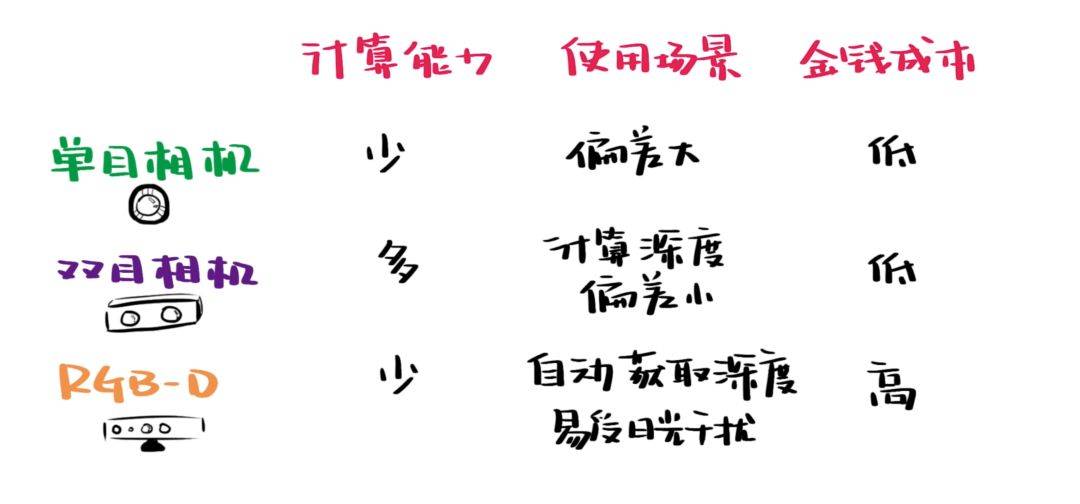
人們會根據使用環境、計算能力和金錢成本等因素,選擇不同的 SLAM 方案。 單目方案需要的計算資源較少、成本低,但偏差較大;雙目方案雖然能估算像素點的深度,但需要大量計算資源;RGB-D 方案雖然自動獲取了深度,但視野較小, 也容易受到日光干擾。
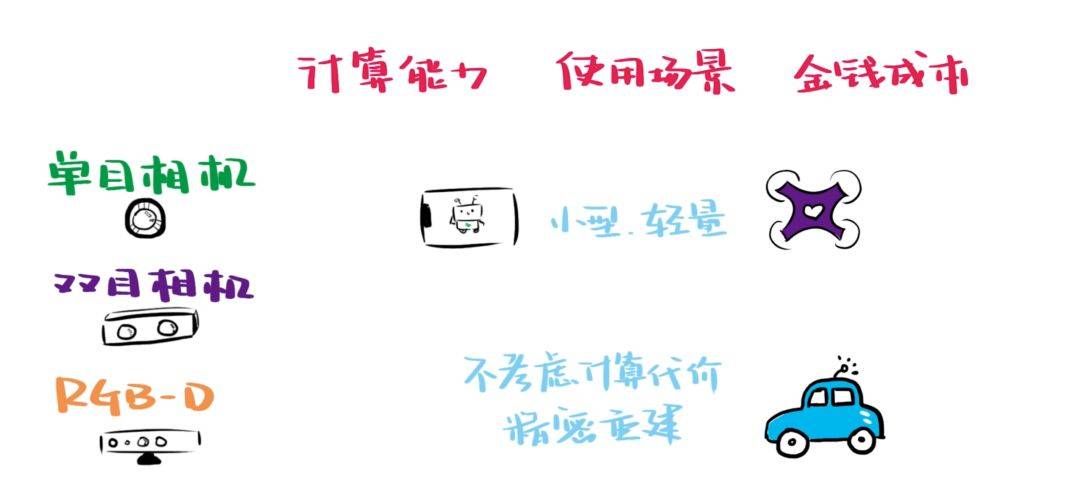
這些不足之處決定著 SLAM 的未來,並分出了兩個方向。 其中之一是向小型、輕量化發展,以便更好地在嵌入式和手機這類小型設備上運行;另一個方向則是在不考慮計算代價的基礎上,實現更精密的三維重建。
還有,人們常說的回環檢測是什麼?

在估算位置、繪製路徑的過程中難免會有誤差,誤差累積過多就會產生“錯誤”。 如果機器能認出曾經經過的地方,路徑就能閉合成“環”,不僅讓誤差歸零還能矯正軌蹟的形狀。 對於 SLAM 來說,回環檢測是非常重要的一環。
*文章為作者獨立觀點,不代表虎嗅網立場
本文由 KnowingAI知智 授權 虎嗅網 發表,並經虎嗅網編輯。 轉載此文章須經作者同意,並請附上出處( 虎嗅網 )及本頁鏈接。 原文鏈接:https://www.huxiu.com/article/251614.html
本文由 KnowingAI知智 授權 虎嗅網 發表,並經虎嗅網編輯。 轉載此文章須經作者同意,並請附上出處( 虎嗅網 )及本頁鏈接。 原文鏈接:https://www.huxiu.com/article/251614.html
未來面前,你我還都是孩子,還不去下載 虎嗅App 猛嗅創新!